








果蔬呼吸測定儀 水果蔬菜呼吸強度測定儀 優云譜 YP-GX10
山東優云譜光電科技有限公司 面議 【儀表網 儀表研發】繩驅動連續體機器人(CDCR)是重要的軟體機器人,具有結構輕巧、安全和自由度高等特點,能夠基于其自身的柔性和可拉伸性產生大幅度彎曲、扭轉變形等動作,因此它可在狹窄和復雜的環境中很好地工作。
目前,CDCR系統中常用的光纖布拉格光柵傳感器模量高、伸長率極低、缺乏粘附機制,限制了軟體機器人的運動且易與機器人分層,這使這種剛性的傳感器不適合集成系統。如何設計柔性可黏附傳感器,用于CDCR的自感知及其運動監控仍是挑戰。
水凝膠由交聯聚合物網絡和大量水組成,因而和生物體具有良好的相容性,非常適用于可穿戴或可植入設備。傳統的水凝膠難以實現穩定的拉伸,因此不能用于制造可拉伸的應變傳感器。
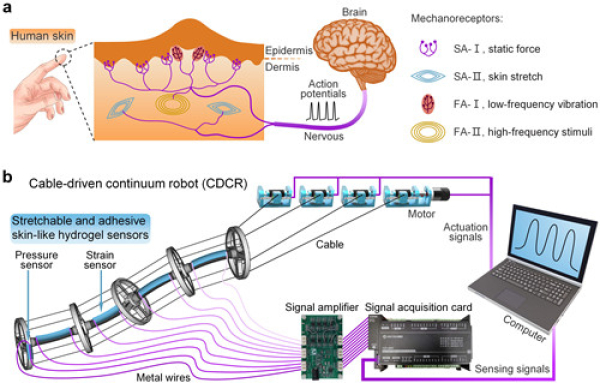
中國科學院寧波材料技術與工程研究所智能高分子材料團隊研究員陳濤、副研究員高國榮,與精密運動機器人團隊研究員張弛、高級工程師鄭天江等合作,基于兩個團隊在離子導電凝膠領域(Adv. Mater, 2020, 32, 2004290;Nano Energy, 2021, 90, 106614等)與CDCR領域(IEEE Access, 2019, 11, 174236;Symmetry, 2019, 11, 1158等)的研究成果,運用由離子導電聚丙烯酰胺/海藻酸鹽/納米粘土聚合物復合水凝膠制成的類皮膚狀水凝膠傳感器,實現了CDCR柔性自我感知(圖1)。
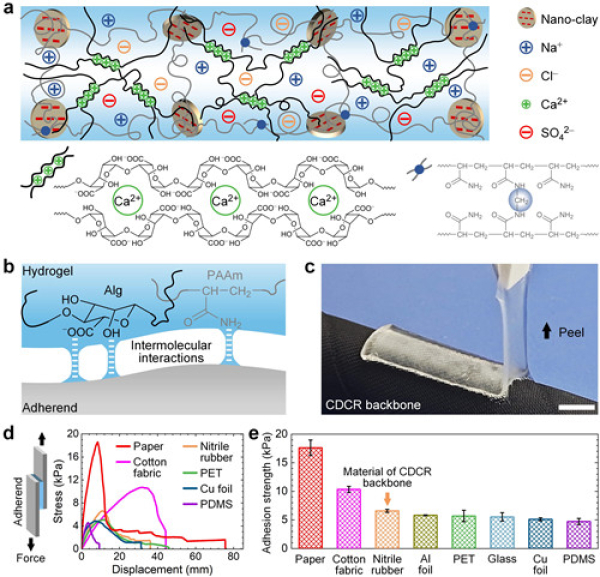
非共價交聯動態網絡結構的引入,使水凝膠具有良好的可拉伸性(1840%)、自粘附性(6.6 kPa粘附強度)及自修復性能(圖2),同時,能夠對多種形變(拉伸、壓縮、彎曲、扭轉)進行寬范圍的敏感響應(圖3),將其作為類皮膚傳感器粘附在CDCR表面,CDCR能夠獲得感知運動的本體感覺和感知障礙物及陷阱的外感知(圖4)。進一步仿人類的感覺系統,研究構建了用于調節CDCR彎曲的閉環控制系統,可構建“驅動-傳感-反饋”指導后繼驅動的閉環控制(圖5)。該研究為設計應用于繩索驅動的連續體軟機器人的傳感器和閉環系統建立了有效途徑。
相關研究成果以Cable-Driven Continuum Robot Perception Using Skin-Like Hydrogel Sensors為題,發表在Advanced Functional Materials上。研究工作得到國家自然科學基金、國家重點研發計劃、浙江省自然科學基金、寧波市科技創新2025重大項目、寧波市自然科學基金、中科院前沿科學重點研究計劃、中德合作國際交流項目及王寬誠教育基金等的支持。

圖1.類皮膚水凝膠傳感器用于繩驅動連續體機器人的感知

圖2.類皮膚水凝膠傳感器的構建、修復與黏附等性能調控

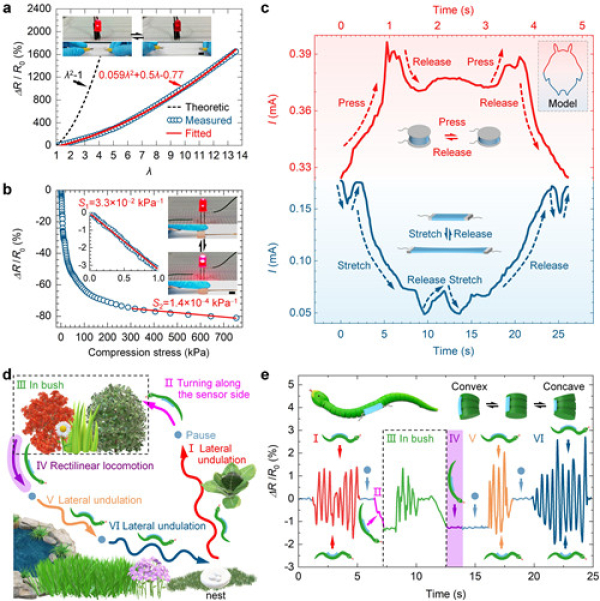
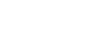
圖3.類皮膚水凝膠傳感器的感知性能調控

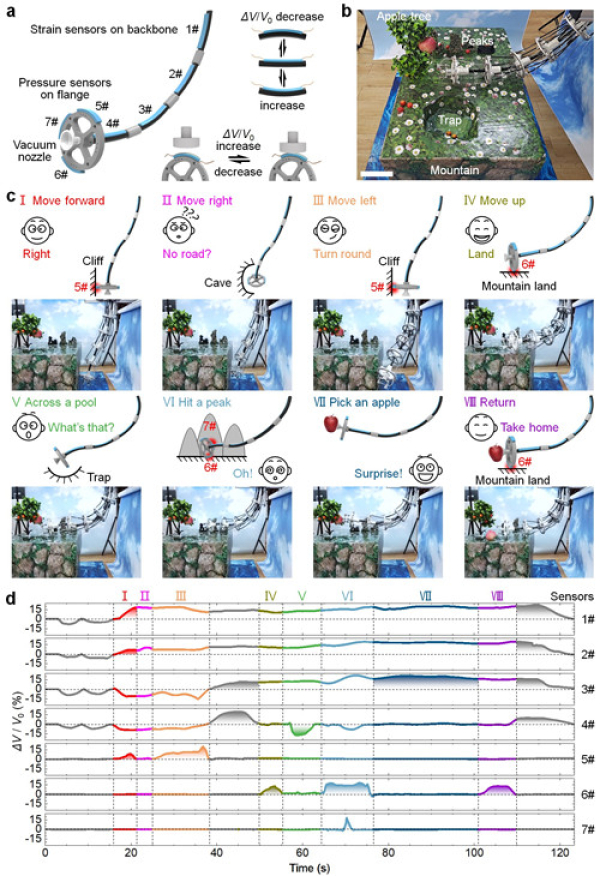
圖4.繩驅動連續體機器人感知用類皮膚水凝膠傳感器

圖5.繩驅動連續體機器人水凝膠傳感器感知系統的閉環控制












所有評論僅代表網友意見,與本站立場無關。